« TypeRobix » : différence entre les versions
m largeur standard c'est 19mm plutôt que 20mm |
Ajout de la catégorie "Clavier" |
||
| (2 versions intermédiaires par un autre utilisateur non affichées) | |||
| Ligne 2 : | Ligne 2 : | ||
TypeRobix est le clavier théorique idéal imaginé par [[Utilisateur:Robipo|Robipo]]. | TypeRobix est le clavier théorique idéal imaginé par [[Utilisateur:Robipo|Robipo]]. | ||
Mise à jour 06/01/2013 : En fait il ressemblerait à l’[http://ergodox.org/Images/ErgoDox_001_L.png ErgoDox] ou à ça (deux razer orbweaver en symétrie) : | |||
[[Fichier:double_orbweaver.png|center|1000px]] | |||
C’est surtout un proof-of-concept d’un clavier idéal différent du [[TypeFauvix]]. | C’est surtout un proof-of-concept d’un clavier idéal différent du [[TypeFauvix]]. | ||
| Ligne 20 : | Ligne 25 : | ||
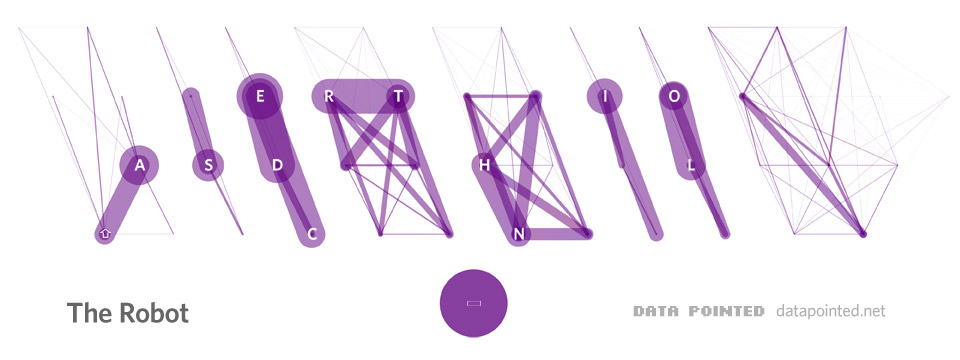
- (à tester/discuter) Touches de taille rectangulaire : 19mm×15mm. Raisonnement : Le but est de réduire la distance parcourue par des doigts. On ne peut pas réduire la largeur à cause de la largeur des doigts, par contre, je pense qu'une réduction en hauteur peut-être bénéfique pour limiter la distance (la distance est surtout due aux déplacements verticaux de toute façon : http://www.datapointed.net/media/2010/07/the_robot.jpg). | - (à tester/discuter) Touches de taille rectangulaire : 19mm×15mm. Raisonnement : Le but est de réduire la distance parcourue par des doigts. On ne peut pas réduire la largeur à cause de la largeur des doigts, par contre, je pense qu'une réduction en hauteur peut-être bénéfique pour limiter la distance (la distance est surtout due aux déplacements verticaux de toute façon : http://www.datapointed.net/media/2010/07/the_robot.jpg). | ||
[[Catégorie:Clavier]] | |||
Dernière version du 27 mars 2023 à 15:21
TypeRobix
TypeRobix est le clavier théorique idéal imaginé par Robipo.
Mise à jour 06/01/2013 : En fait il ressemblerait à l’ErgoDox ou à ça (deux razer orbweaver en symétrie) :
{kind=link}

C’est surtout un proof-of-concept d’un clavier idéal différent du TypeFauvix.

N'hésitez pas à donner vos avis/suggestions ou à demander plus d'informations/justifications si vous ne comprenez pas un de mes choix (Discussion:TypeRobix).
- ((7×5)+6)×2 = 82 touches : Deux rectangles de 7×5 touches pour les doigts, et deux croix (+) de 6 (+1 pour les super, à voir si y a pas une meilleure solution) touches sous les pouces.
- Splitté ajustable par un fil pour plus de liberté (voir http://www.kinesis-ergo.com/freestyle.htm)
- Idéalement, trois pieds/barres de longueur ajustable pour surélever au niveau des poignets et/ou des indexes (possibilité de clavier vertical). Alternative : des clapets comme la plupart des claviers.
- Doit être entièrement programmable
- Idéalement les switch doivent être du style http://mykeyboard.co.uk/microswitches/ (environ 10cN à 1mm pour activer la touche, mais permettant aussi pas mal de force (genre 50cN à 2mm) avant de bottom-out). Alternative mécanique : Cherry ML http://www.cherrycorp.com/english/switches/key/ml.htm (mais j’ai pas testé personnellement, donc à voir). Dernière alternative de secours : type membrane à double ciseaux, comme le TypeMatrix.
- (à tester/discuter) Touches de taille rectangulaire : 19mm×15mm. Raisonnement : Le but est de réduire la distance parcourue par des doigts. On ne peut pas réduire la largeur à cause de la largeur des doigts, par contre, je pense qu'une réduction en hauteur peut-être bénéfique pour limiter la distance (la distance est surtout due aux déplacements verticaux de toute façon : http://www.datapointed.net/media/2010/07/the_robot.jpg).
{kind=link}